
Expert in mechanics and master servo controls for automation, computer science, machine vision and robotics, Caire has been helping companies design specialized machinery since 1987. With its partner STI, Caire integrates numerous processes, including the application of paint or varnish. "Currently, the majority of application lines we create or modify are manual lines that our customers want to robotize. But programming a robot for small batch production with high diversity involves numerous movements. This is time consuming and requires the involvement of a highly skilled robotics engineer. This difficulty, combined with the fact that qualified painters are scarce, hinders robotization," explains David Mangin, business manager at Caire. Caire's few customers who use robots in their application lines also face programming difficulties. Given the number and diversity of components to be processed, these robots create "approximate" or rough trajectories that cover all the components to be processed. Trajectories are the movements of a robot. A trajectory is a curve in the plane (space) parmeterized over time. The individual points on the curve represent positions at specific points in time. Some of these trajectories are then reprogrammed to be more precise. Robot engineers usually work on this for several weeks. Despite these adjustments, the trajectories do not always match the components one hundred percent, which in turn requires complex adjustments to the air and product flow. The production line must be stopped for each adjustment.
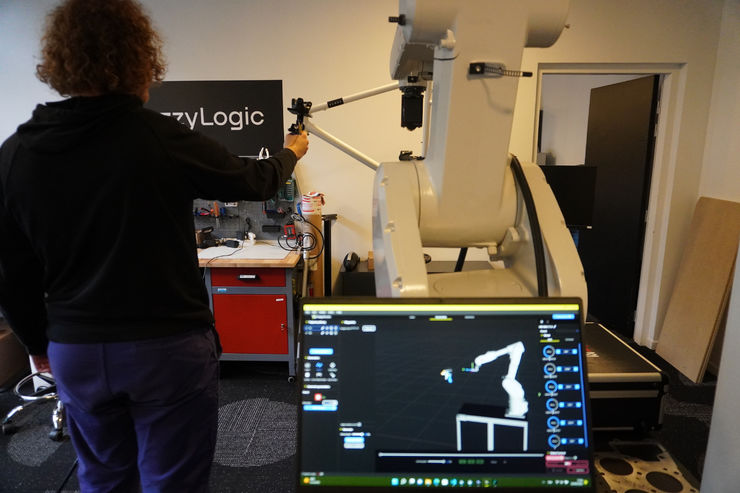
Motion detection using a portable learning device
Fuzzy Logic's Repplix software module solves this problem by eliminating the need for robot programming. The robot becomes a precision tool in the hands of the operator, allowing him to automate his task independently without the need for a specialist. To do this, the operator uses a portable learning device that teaches the software a trajectory. The Fuzzy Studio software provides a monitoring system via a real-time digital twin of the robot installation, taking into account collision monitoring and trajectory feasibility in the robot's environment. In addition, alarms are set up to warn the operator spontaneously. Trajectory detection links several process parameters such as the paint gun triggering and its flow rate. The operator can then modify the trajectory and process parameters via the graphical user interface - even after the robot has been taught the trajectory. The cycle is then started using Fuzzy Studio and the robot executes the application exactly as the operator has shown it. The speed at which the robot moves is set directly in the software and can be changed via the learning speed. The cycle is executed by the robot independently, without the need for operator supervision. For each new row of components to be processed, the process is repeated a few minutes later. Another advantage is that the module can be used immediately, without prior training.
While Repplix controls the robot without preparation, Fuzzy Logic are working to secure the process and interface between Repplix and the safety PLCa integrated into the system. The company's robotics engineers have begun defining interchange tables to control external actions through Repplix, such as triggering cylinders, motors, application guns and flow controllers. This safety aspect is being developed within a normative framework. According to Ryan Lober, CEO of Fuzzy Logic, "The ability for paint specialists to show a robot how to run an application is an absolute game changer. The specialist intuitively passes on their knowledge to the robot, which ensures that the task is repeated. The robot enables the experts to multiply their productivity and the company to tackle new ideas for manufacturing processes. This is called automation independence."
In the near future, three projects will be implemented in collaboration with Caire for a major aerospace company. Repplix will be used for product application on components with high production variability. The line is scheduled to be installed in September 2023.
Autor(en): wi

