
One of the greatest challenges in surface processing is the presence of defects, which are located in different places on each component. This cannot be solved with classic robot programming. In order to automate the polishing of flaws on components and make it more efficient, Visomax Coating invested in the ArtiMinds Robot Programming Suite (RPS) software from the manufacturer of the same name in 2016. With ArtiMinds, new robots can be integrated easily and intuitively in all kinds of applications. The implemented CAD2Path function allows complex motion paths, for example for polishing a fender, to be created quickly and precisely. To avoid having to teach-in points manually, a CAD file of an object can be imported and the trajectory can be created based on the edges of the CAD model.
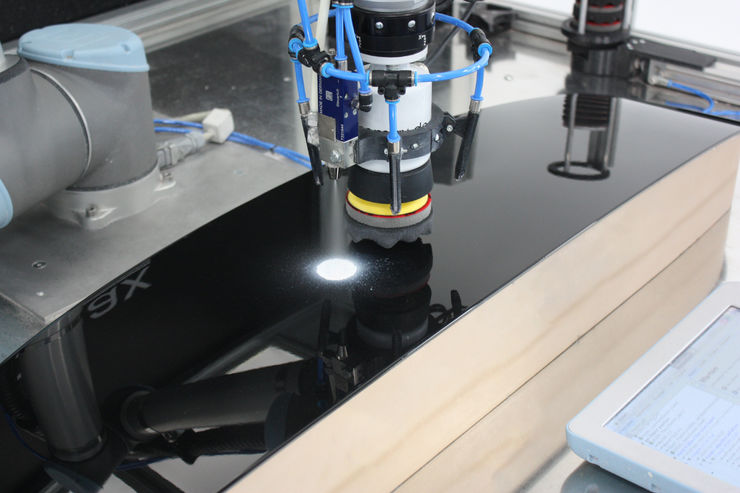
Force controlled polishing of flaws
However, the difficulty of the application was not only in the handling of components with different defects, but also in the integration of necessary sensor components such as a force-torque sensor and a camera system. This was because the defects were first to be located by camera and then approached and polished in a force-controlled manner. To ensure that the polishing movement always has the perfect contact pressure, Visomax works with the force module of the RPS. With the templates or modules for individual motion sequences stored in the RPS, the programming effort can be significantly reduced in contrast to conventional programming.
In addition to the advantage of easy operation and the greatly simplified teach-in and programming, offline programming and simulation of the robot application in three-dimensional space also offer a useful tool in the preparation phase.
The complete article was published in German in the May/June issue of JOT.
Autor(en): Silke Glasstetter, ArtiMinds Robotics

